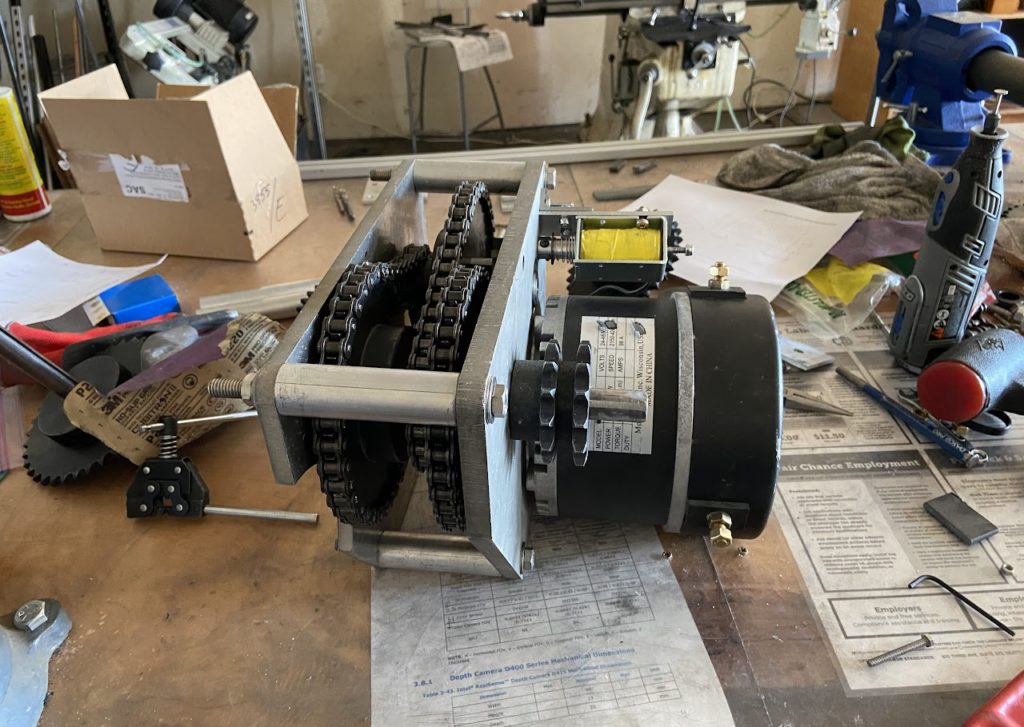
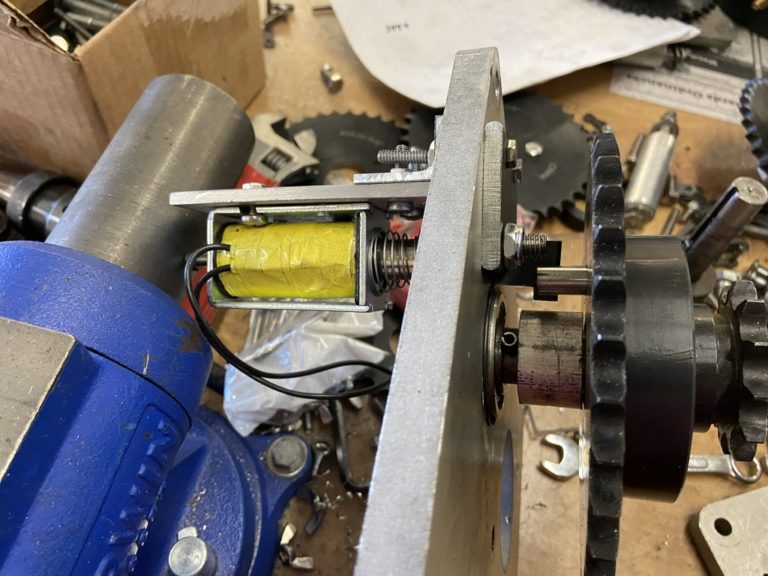
During my time as a Mechanical Engineering Intern at Directed Machines, my main project was designing and prototyping a cost-effective and functional emergency brake for the robot. The robot uses a 1:70 chain reduction for its drivetrain, therefore the most effective placement for an e-brake would be on the sprocket that only experiences 1/70 of the forces of the entire robot. I decided to design the simplest solution possible to reduce the possible points of failure. My design consists of a pawl that is attached to a solenoid. When activated, the solenoid would release the pawl, which then catches onto a pin and stops the motor and robot completely.
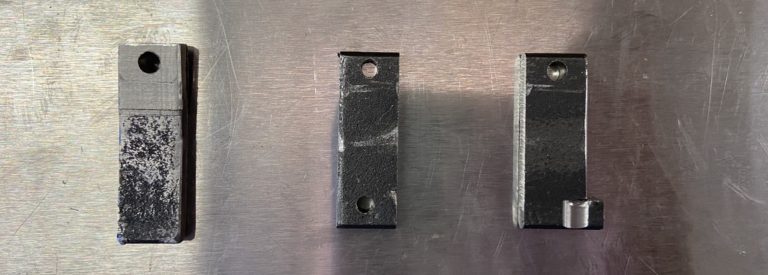
The video is of my first iteration of the drivetrain e-brake. It succeeded in stopping the PMDC electric motor, but the pin and braking pawl wore down over time. A way to combat this was to change the materials and design of each component. The picture on the right shows the iterations of the braking pawl.
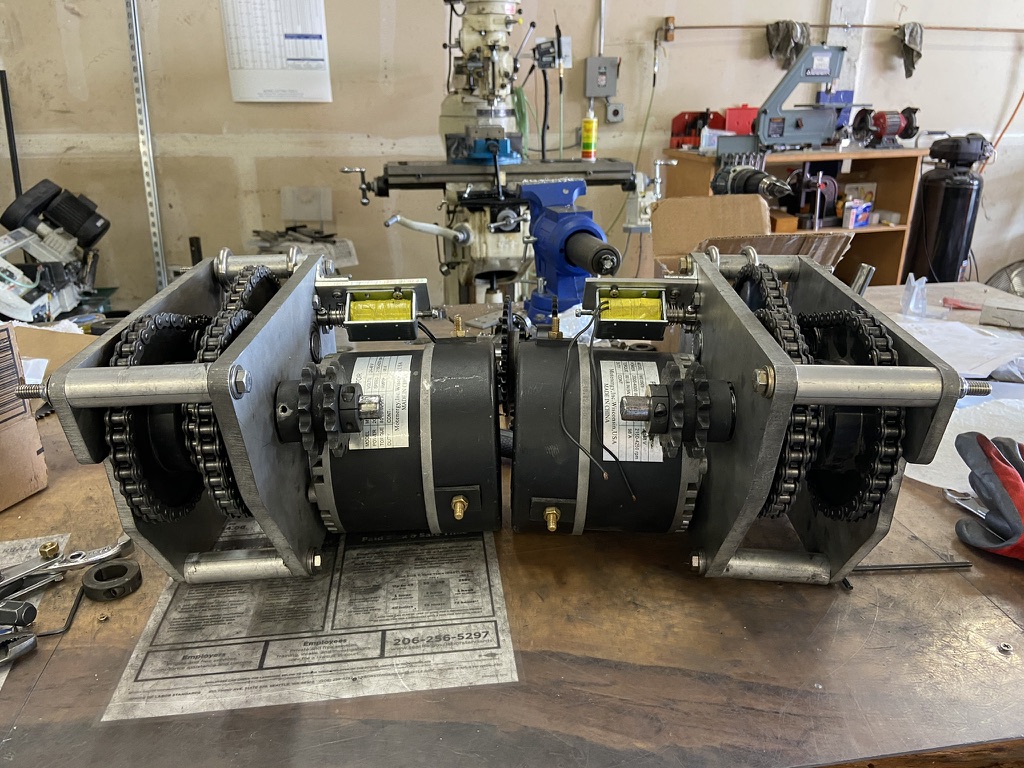
The picture to the left is the oil-hardened pin that was press-fit into the hardened steel sprocket. As a result of weeks of designing, prototyping, and testing, the drivetrain e-brake was functional and manufacturable for a startup. My final iteration was able to stop a 1500 lb. robot on a 30-degree incline. Working with chains was worth it in the end as I was able to use an angle grinder for the first time to cut the oil-hardened steel pin. Prototypes of my design were implemented into several robots for testing.