As a member of the manufacturing team for the Husky Robotics Club, I was responsible for machining various parts of the mock mars rover. Operating a 2.5-axis Mill and 2-axis Lathe to produce function parts of the rover, ranging from arm linkages to chassis spacers.
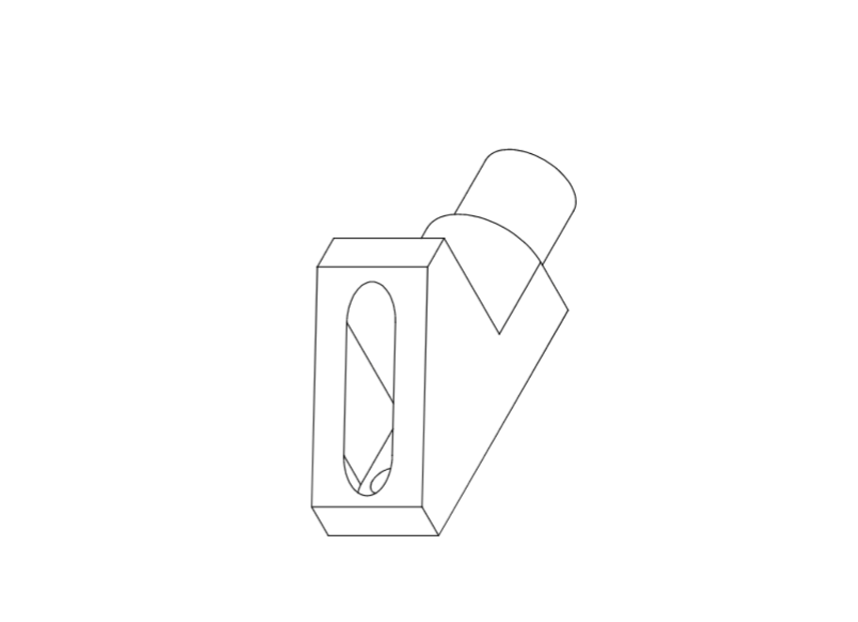
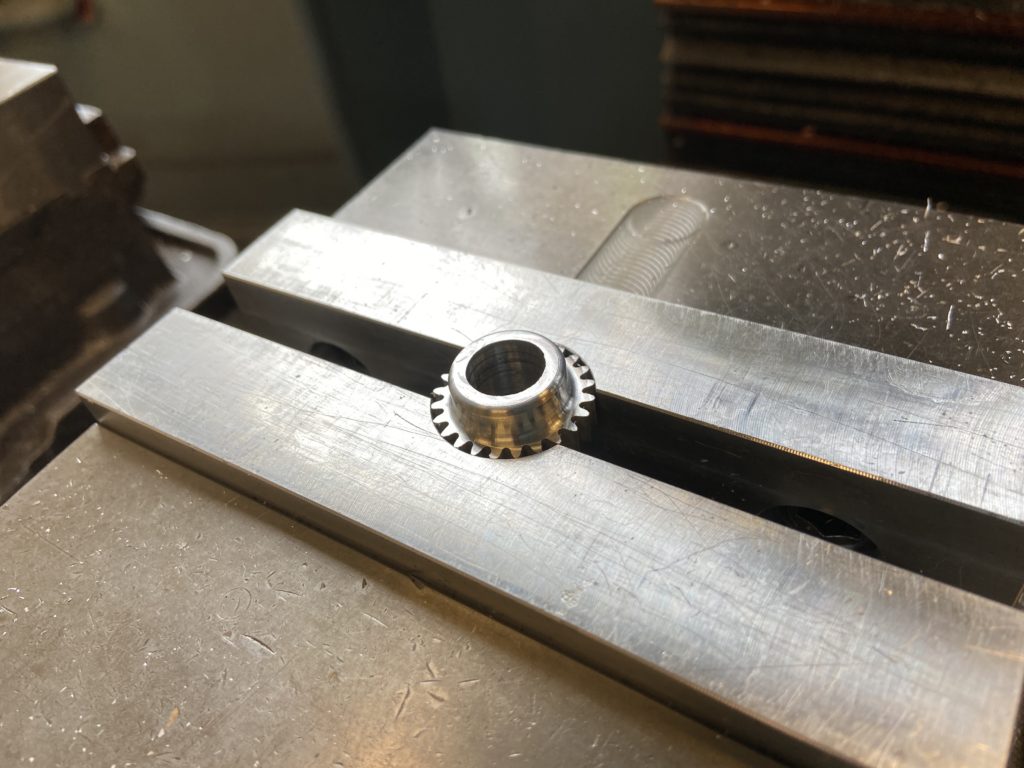
I have produced more than 20 rover parts within .005″ tolerance without any tool breakages or part errors. This is an example of a latch for the rover that I machined to the dimensions provided by a drawing file. By collaborating with a team of 14, we have manufactured and delivered over 100 parts collectively before the deadline with less than 5% error in parts.
This is our video submission for the International University Rover Challenge. We took 2nd place in the world in 2019.